Abstract
Disney's animatronic history began with the Tiki Room, and the singing parrots. Thus, I wanted my first character animation project to be the same. My family has long wanted a tiki bar in our backyard, so I set out to create a miniature animatronic show for this space!
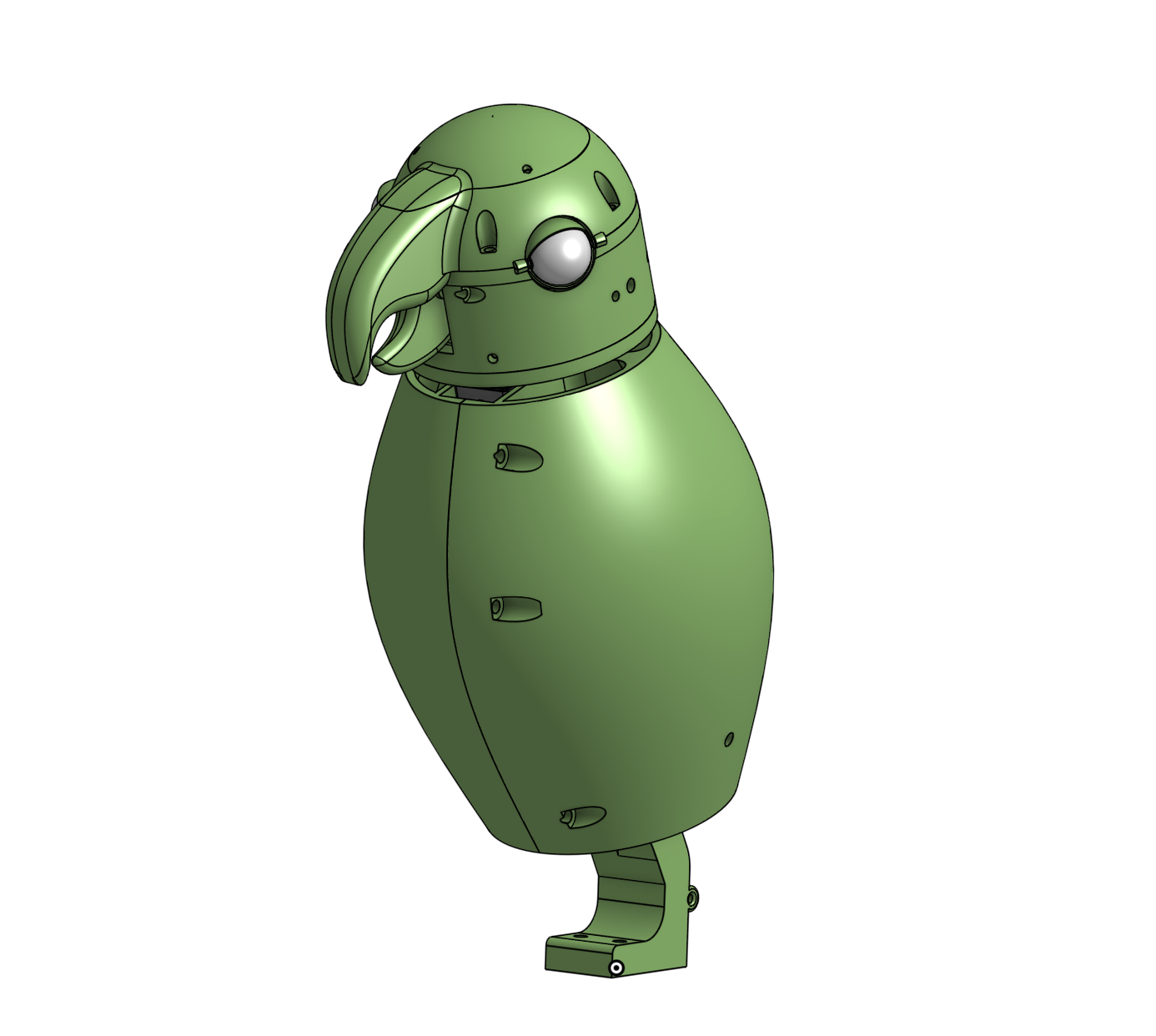
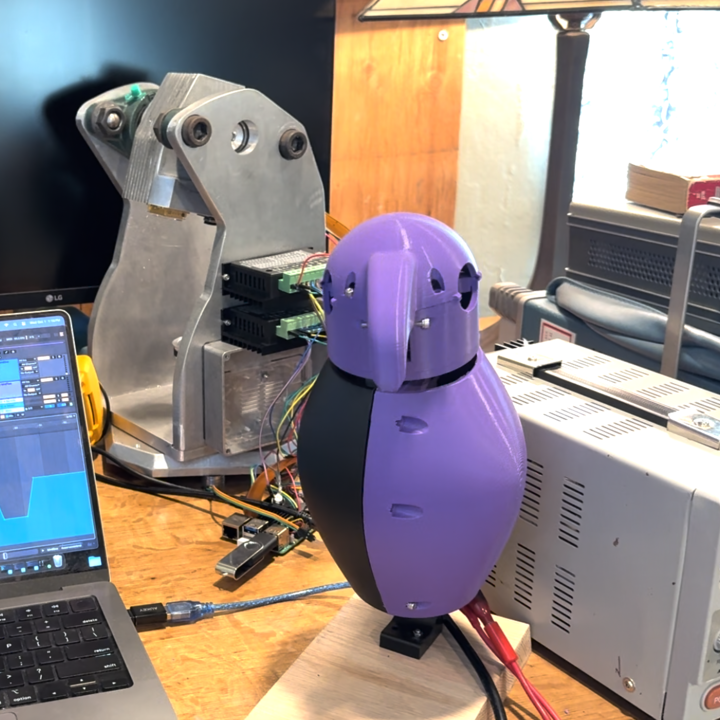
Design
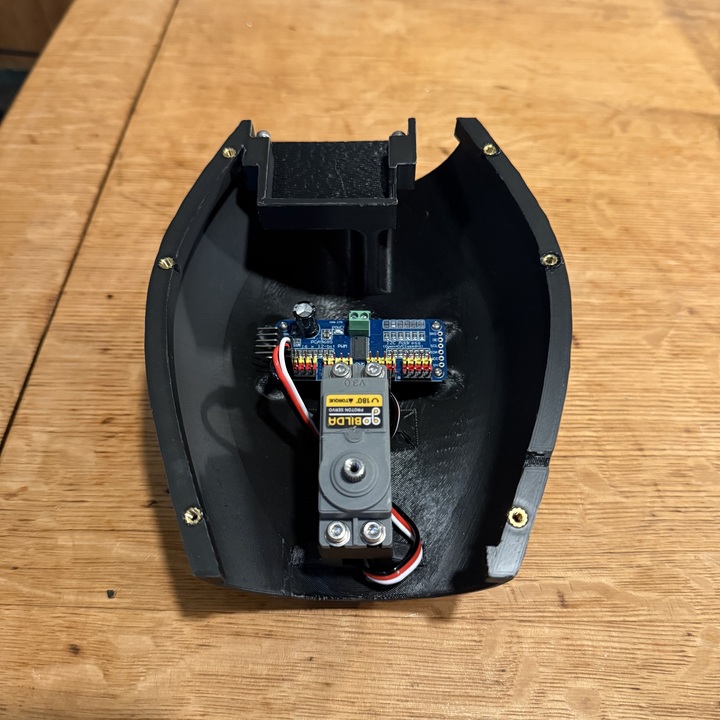
This bird ran through three different structural versions before I settled on the semi-formal skeleton used in the final iteration. This chassis provides a basic shape for decoration and final form while having rigid attachment points for hobby servos and individual PCA9685s for control hardware. I used GoBilda Proton torque servos, with servo hubs for attachment to 3d printed parts at the joints of the bird.
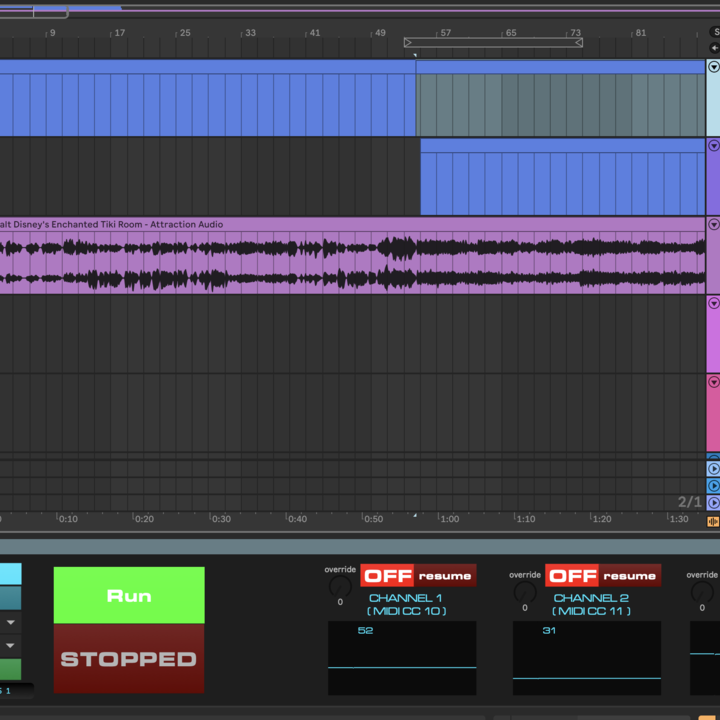
Software
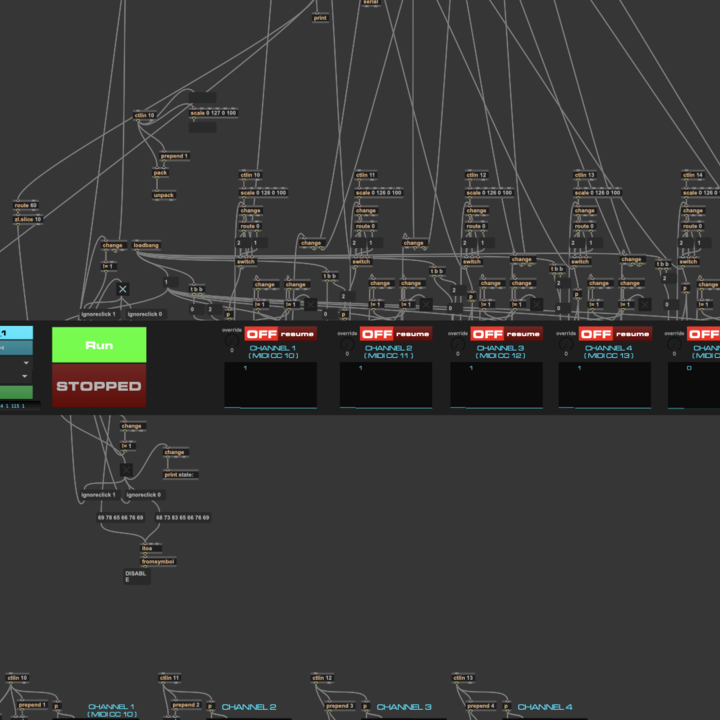
Each bird is essentially a PCA9685 and four servos, representing a different I2C target device addressed by an Arduino running ‘the show.’ I was inspired heavily by roboticist Mark Setrakian, who uses a type of plug-in development environment for the Ableton Live music software to control some of his robots. This made sense to me, as motion can be mapped to midi parameters, and animated on the long time-scales of synchronous music. This also reflects the way the original Tiki Room was animated, using multi-track audio tape to control the birds. Thus I sought to learn the Max for Live environment, eventually composing a plugin that takes midi constant control signals and turns them into serial messages sent at a constant 50Hz refresh rate to the arduino for mapping to the PCAs. The final version will use a json file to store these messages for headless playback, not requiring Ableton to be open at all.
Conclusions
A lot of the project was creating multiple use pieces of software that can be deployed going forward. Not only did it force me to learn a lot about communication protocols and microcontrollers, but I developed some of my own control techniques that I can use going forward for totally custom projects.